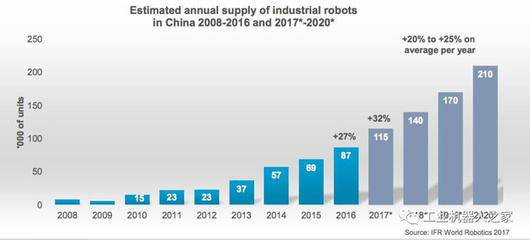
在當(dāng)今以智能制造為主導(dǎo)的工業(yè)4.0浪潮中,工業(yè)機(jī)器人及其末端執(zhí)行器——機(jī)械手,已成為現(xiàn)代生產(chǎn)線不可或缺的核心組成部分。它們不僅是自動(dòng)化程度的象征,更是提升生產(chǎn)效率、保障產(chǎn)品質(zhì)量、實(shí)現(xiàn)柔性制造的關(guān)鍵技術(shù)裝備。
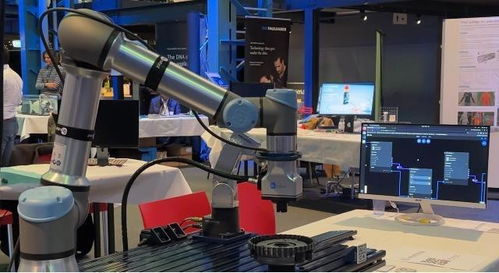
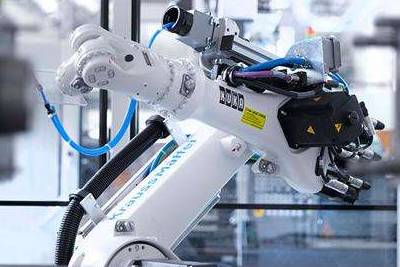
工業(yè)機(jī)器人是一種可編程、多功能的操作機(jī),通常通過預(yù)先設(shè)定的程序或人工智能技術(shù),在三維空間內(nèi)執(zhí)行諸如搬運(yùn)、焊接、噴涂、裝配、打磨等多種復(fù)雜任務(wù)。其核心價(jià)值在于將人類從重復(fù)、繁重、高危或高精度要求的工作中解放出來。一個(gè)典型的工業(yè)機(jī)器人系統(tǒng)主要由控制器、伺服驅(qū)動(dòng)系統(tǒng)、機(jī)械本體以及末端的執(zhí)行機(jī)構(gòu)構(gòu)成。控制器相當(dāng)于機(jī)器人的“大腦”,負(fù)責(zé)處理指令和協(xié)調(diào)運(yùn)動(dòng);伺服系統(tǒng)提供精準(zhǔn)的動(dòng)力;機(jī)械本體(機(jī)械臂)則決定了工作范圍和靈活性。
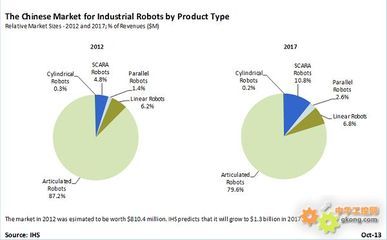
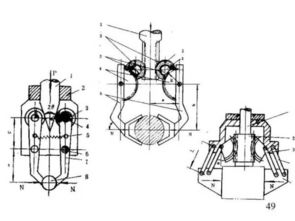
而機(jī)械手,正是安裝在機(jī)器人“手腕”末端的直接與工件或工具接觸的部件,堪稱機(jī)器人的“手”。它是任務(wù)執(zhí)行的最終環(huán)節(jié),其設(shè)計(jì)與選用直接決定了機(jī)器人能夠完成何種具體作業(yè)。根據(jù)抓取對(duì)象和作業(yè)需求的不同,機(jī)械手主要分為以下幾類:
- 夾持式機(jī)械手:最為常見,通過手指的開合來夾持工件,如氣動(dòng)/電動(dòng)二指或多指夾爪,廣泛應(yīng)用于搬運(yùn)、上下料等場(chǎng)景。
- 吸附式機(jī)械手:利用真空(吸盤)或磁力吸附工件,特別適用于表面平整、易損(如玻璃、板材)或不可夾持的物體。
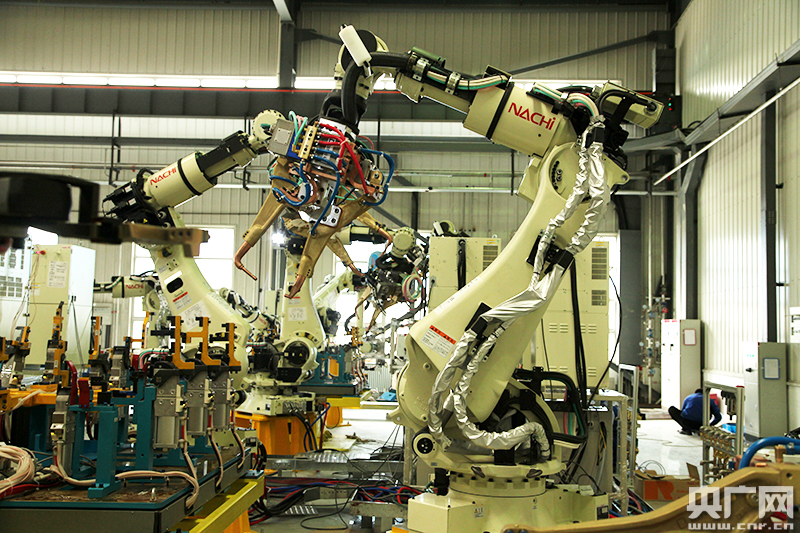
- 專用工具式末端:不再是“手”,而是直接集成了作業(yè)工具,如焊接槍、涂膠閥、噴涂槍、銑削主軸等,使機(jī)器人變身為一臺(tái)可移動(dòng)的專用加工站。
- 多指靈巧手:模仿人手的復(fù)雜結(jié)構(gòu),具有多個(gè)關(guān)節(jié)和自由度,能夠?qū)崿F(xiàn)更精細(xì)的操作,如裝配細(xì)小零件,但目前成本較高,多用于科研或特定高精度領(lǐng)域。
工業(yè)機(jī)器人與機(jī)械手的協(xié)同,帶來了顯著的產(chǎn)業(yè)變革:
- 生產(chǎn)效率的革命性提升:機(jī)器人可以7×24小時(shí)不間斷工作,生產(chǎn)節(jié)拍穩(wěn)定,極大提升了產(chǎn)能。
- 產(chǎn)品質(zhì)量的一致性保障:機(jī)器人動(dòng)作精度高、重復(fù)定位準(zhǔn)確,消除了人為因素導(dǎo)致的質(zhì)量波動(dòng)。
- 生產(chǎn)系統(tǒng)的極致柔性:通過快速更換不同的機(jī)械手或重新編程,同一條機(jī)器人生產(chǎn)線可以適應(yīng)多品種、小批量的生產(chǎn)需求,這是傳統(tǒng)專機(jī)難以實(shí)現(xiàn)的。
- 工作環(huán)境的人性化與安全化:替代人類在惡劣環(huán)境(如高溫、粉塵、有毒)或高風(fēng)險(xiǎn)崗位工作,保障了人員安全。
其應(yīng)用也面臨挑戰(zhàn),如高昂的初期投資、對(duì)維護(hù)人員專業(yè)技能的要求、以及與現(xiàn)有生產(chǎn)系統(tǒng)集成的復(fù)雜性。隨著視覺傳感、力覺控制、人工智能和協(xié)作機(jī)器人(Cobot)技術(shù)的深度融合,工業(yè)機(jī)器人與機(jī)械手將變得更加智能、安全與易用。它們將不再是被隔離在安全圍欄內(nèi)的“盲”操作者,而是能夠感知環(huán)境、與人緊密協(xié)作、自主適應(yīng)任務(wù)的智能伙伴,進(jìn)一步推動(dòng)制造業(yè)向更高效、更靈活、更智能的方向邁進(jìn)。
工業(yè)機(jī)器人賦予了現(xiàn)代工廠“肢體”與“基礎(chǔ)動(dòng)作”,而千變?nèi)f化的機(jī)械手則賦予了它完成具體任務(wù)的“手藝”。二者結(jié)合,共同構(gòu)成了智能制造的堅(jiān)實(shí)骨架與靈巧雙手,持續(xù)驅(qū)動(dòng)著全球工業(yè)生產(chǎn)的轉(zhuǎn)型升級(jí)。